
What is robotic-assisted hip replacement?
Robotic arm assisted hip surgery transforms joint replacement procedures by integrating 3D CT-based planning software and haptic technology. This solution has been assisting joint pain sufferers for over a decade, and its use is becoming increasingly common.
A pre-operative CT scan is used to map the patient’s skeleton around the hip to help establish a personalised surgical plan. Decisions can be made in the planning stage that affect the extent and location of bone resection around the hip. The software also allows for the virtual positioning of the components of the hip replacement. Once the optimal position has been determined, the robotic arm assists the surgeon in achieving this during the operation.
The robotic arm does not perform the surgery, nor can it make decisions or move independently. However, it enables the surgeon to execute the pre-operative plan or make necessary adjustments during the procedure.
How does it work ?
1. Personalised surgical plan
Prior to surgery, a CT scan of the hip joint is carried out to generate a 3D virtual model of the patient’s unique anatomy. This 3D model enables the surgeon to gain a comprehensive understanding of the joint and visualise structures that are not typically discernible with an X-ray alone. This additional information assists the surgeon in determining the appropriate size, placement and positioning of the implant.



2. During Surgery and Bone preparation
The surgeon places arrays into the bony pelvis and thigh bone that are recognised by the camera on the robot. Probes are then used to match the patients bony anatomy to the CT scan to that the robots knows exactly where your skeleton is in relation to the robotic arm and machine. Live information is provide to verify that the CT scan matches the patient’s actual anatomy.
Camera on the robot
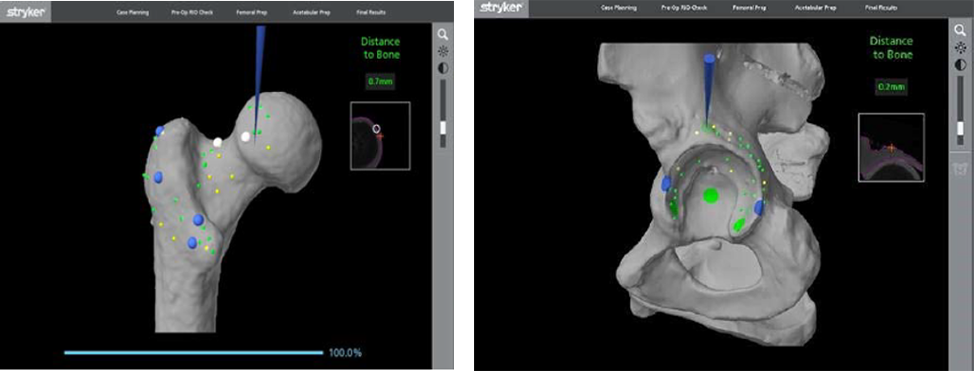
Registration points on both sides of the hip that are used to match up the patient’s own anatomy to the CT.

Hand held array

Robotic arm
Haptic technology
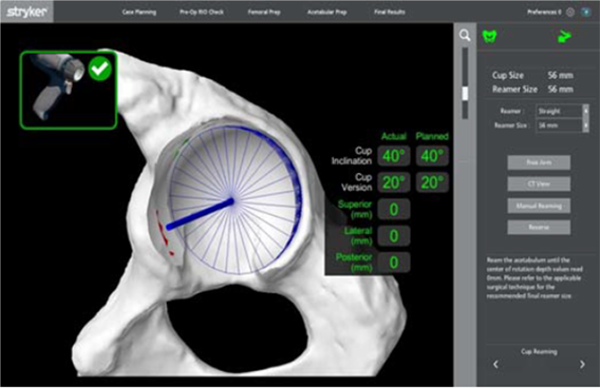
3. Range of Motion assessment and Implant placement
The robotic-arm guides the implant at the desired angle defined in the surgical plan for the cup. The femur is then prepared and stem inserted.
Assessment of the movement and tension of your new joint follows implant insertion. The software provides real time data on implant position, leg lengths and offset. This allows the surgeon to continuously assess the movement and tension of the joint and to make changes during surgery if needed.

